米澤 明憲(東京大学教授)

長尾 真(京都大学総長)
二村 良彦(早稲田大学教授)
[ Frame / No Frame ]
日本学術振興会は,日本の科学技術の未来を拓く目的のもと,大学を中心とした新しい研究実施スキーム「未来開拓」事業を,平成8年度より開始しました. 研究分野につき,年間およそ5億円の研究費が出資されてきました. 「知能情報・高度情報処理」はそのような研究分野の1つで,6つのプロジェクトから構成されています. そのうちの5プロジェクトは本年度(平成12年度)に終了します.
本シンポジウムは,この5プロジェクトの成果報告会であるとともに,本分野の研究がどのようなことを目指しているのかが,専門の研究者でなくても分かっていただけるように企画いたしました. 1日目は,まず京都大学総長から「21世紀の知能情報処理」についてお話しいただき,その後各プロジェクトのリーダーの方々がプロジェクトの成果を分かり易くお話いたします. また2日目には,各プロジェクトの専門的な研究成果が具体的な形でわかるように,デモンストレーション中心の発表をいたします.
本シンポジウムの企画によって,知能情報処理や高度情報処理に対する一般の方々のご関心とご理解が益々高まりますことを切に期待いたします.
1日目の講演会(大隈講堂にて13:00〜17:40)では,「知能情報・高度情報処理」分野における研究リーダー達により,21世紀に向けて,どのような研究を行うべきかあるいは研究成果を準備したかが語られます. 21世紀の科学技術を担う若い世代の人たちにも,国際的に最高水準の研究成果を見ていただきたい. そのような願いから,2日目には広い会場(国際会議場にて10:00〜18:00)で充分時間を取ってデモと展示を行います. ここでは,「そんな凄いことが出来るの!」と言って驚くような成果に出会うでしょう. また,一流の研究者と直接議論することも出来ます. 学生,一般社会人,専門家,企業家等多数の方がご来場され,最先端の情報処理技術に触れられることを願っています.
■ プログラム 21世紀の知能情報処理へむけて本プロジェクトでは,ネットワークで結ばれた多数の観測ステーション(首振りビデオカメラを備えたPC)や視覚機能を備えた移動ロボットにより,動的に変化する実世界の状況を多角的に観測し(図1),
ことを目的としている.
こうした分散協調視覚システムを利用すれば,実時間広域監視・交通管制システム,遠隔会議・講義システム,3次元立体テレビシステム・知的テレビスタジオ,舞踊・スポーツなど高度な身体技能の詳細な3次元映像記録,さらには,サッカーなど移動ロボット群によるチームプレイが実現できる.
フォーカスや視線方向などのカメラパラメータを規則的に変化させながら撮影した多数枚の画像(多重画像)を統合し有効な情報を持った画像を生成する「多重画像の統合」という考え方に基づき,以下の4種類の視覚センサを開発し,その有効性を実験によって示した.
視点(投影中心)を固定したまま,視線方向を変化させることができる首振りカメラ(視点固定型パン・チルトカメラ)を用いて高解像度全天空全方位パノラマ画像を撮影し,得られた画像を多様な表現で表示するソフトウェアを開発した(図2). このデモでは,視点固定型パン・チルトカメラとそれで撮影された高精度全天空全方位パノラマ画像を紹介する.

通常の首振りカメラを用いた場合は,首を振ると画像に写される対象の形が大きく変化するため,それを補正するための処理が必要となり,処理速度および対象検出精度に問題が生じる. これに対して視点固定型パン・チルト・ズームカメラを用いると,いくら首を振っても対象の見え方は一定であるため,単純な画像処理で移動対象を捉えることができる. 本研究では視点固定型パン・チルト・ズームカメラを用いて,実時間で対象を追跡するシステムを開発した. 実時間対象追跡では,ビデオ映像処理プロセスとカメラ制御プロセスが実時間で情報交換を行う必要がある. 本研究では,そのためのメカニズムとしてダイナミックメモリ(特許申請中)という新たな共有メモリ機構を考案し,その有効性を実証した.
このデモでは,
の実演を行う.


本研究では,ネットワーク結合された観測ステーションを視覚・行動・通信機能を持った能動視覚エージェントと考え,多数の能動視覚エージェントが協調しながら複数の対象を追跡するシステムの開発を通じて,視覚・行動・通信機能の動的統合方式の研究を行っている. 開発したシステムでは,以下の3レベルでの動的インタラクションによって,多様な動きをする複数対象を適応的に追跡する機能が実現できた.
複数対象の協調的追跡を行うシステムの構成を示すとともに,エージェンシ間の交渉プロトコル(図4)およびシステムを使った追跡実験例をビデオで紹介する.
上記の対象追跡システムを用いれば,広い範囲を動き回る対象の映像化が容易に実現できる. 本研究では,対象追跡システムを利用した以下の3つの映像化システムを開発した.
3次元ビデオ映像は,実世界の対象(たとえば,ダンスをする人間)の姿・形・色をそのまま記録した立体ビデオ映像であり,対象を見る位置や方向,倍率を自由に設定することができる(図5). また,立体ディスプレイを使えば立体ビデオが楽しめる. このデモでは,我々が開発した3次元ビデオ映像撮影システムのアーキテクチャ,処理方式をパネルを使って紹介するとともに,撮影された3次元ビデオ映像を対話的に編集・表示するシステムの実演を行う.

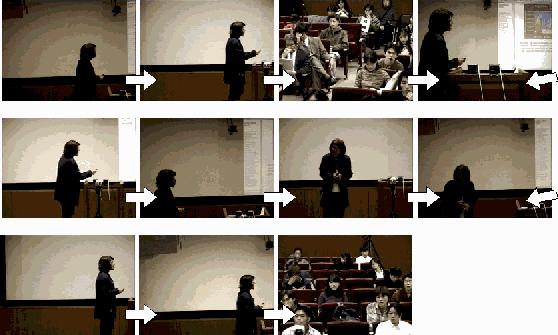
本研究では,遠隔講義のための自動映像撮影システムの開発を行った. 臨場感のある遠隔講義を実現するには,講義室で何が起こっているか(これを動的状況と呼ぶ)を把握することと,動的状況に対して利用者毎にその希望に合わせた適切な映像を同時並行して生成することが必要である. 本研究では,効果的な映像生成法として,
を考え,この両視点から講義映像の自動撮影を行うシステムを開発し,アンケート調査によってその有効性を検証した.
開発したシステムを用いて,実際にUCLAと京大との間で遠隔講義を行ったときの様子(図6)とその評価をビデオによって紹介する.
本研究では,視覚を備えた移動ロボット群に統一の取れたチームプレイ動作を行わせるためのロボット間の協調及び競合行動を視覚に基づいた強化学習によって獲得する手法を考案し,その有効性を実ロボットによる実験によって検証した. 特に本研究では,物理的身体性を持ったロボットに協調動作を行わせるには,いわゆる「アイ・コンタクト」のようなメッセージ通信なしのコミュニケーションを実現することが重要であると考え,そのための視覚機能や行動制御方式を研究対象とした. 具体的な問題設定としては,ロボットによるサッカー競技を取り上げ,ドリブル,シュートなどの個々のロボットの行動,パス,センタリングなどの複数ロボット間の協調行動,さらにはブロックなどの競争行動を視覚に基づいた学習によって獲得するための方式を開発した. この問題は,敵・味方に分かれた多くのロボット群が存在するという環境の中で,他の個々のロボットの行動理解及びチームとしての行動戦略パターンの理解などといった高度な視覚認識の問題を含んでいる.
このデモでは,実際の移動ロボットを使って図7に示すようなサッカーにおける各種のプレイを行わせることによって,行動学習の有効性を示す.
社会のネットワーク化にともなって膨大に流通する自然言語テキストを処理・蓄積・検索する技術は,将来の情報環境を我々人間にとって真に有効で使いやすいものとする鍵となる技術である. このようなテキスト処理の技術は,従来,自然言語処理・理解の研究,および,情報検索の研究という2つの分離した技術分野から研究されてきた. 本研究プロジェクトでは,詳細で厳密な記号論的な方法論をとってきた前者の研究と,数値的・統計的な方法論を主体とした後者の研究とを統合し,将来における自然言語テキストの処理・蓄積・検索技術の基本的な枠組を開発することを目的とする.
具体的には,次の3つの柱を中心に研究を進めた.
部分的構造解析,キーワード・スポッティングなど,アドホックな手法で取り組まれていた言語構造の解析を,言語学的に健全な枠組に統合し,高速・高効率,かつ,高耐性の解析手法を確立した. スタンフォード大学,ザールブリュッケン大学と共同研究を行い,世界最速のシステムを開発した. また,素性構造に基づく言語LiLFesを開発し,公開した.
日本語形態素解析(JUMAN),日本語構文解析(KNP)を開発し,これを公開した. この2つのシステムは,すでに標準的なソフトウェアとして,国内・国外の多くのグループによって使用されている. また,米国・ペンシルベニア大学と共同し,かれらのXTAG文法をもとに網羅的な英語文法XHPSGを開発した.
高度な言語処理技術には,分野依存の知識が不可欠である. 特に,科学的文献の処理には分野オントロジーの基本となる専門用語とその意味関係の把握が不可欠である. この研究では,プロジェクトで開発した解析手法,文法の有効性を示すため,生化学分野の分野オントロジーをテキストから自動作成するシステムを開発した. また,オントロジー獲得を支援するためのシステム(TIMS)を開発し,公開した.
情報検索をより知的にするために言語の構造解析の結果を検索語選択に反映させる研究を行った. この研究システムは,米国で行われた情報検索システムの競技TRECに参加し,商用システムに伍して,優れた成績をあげた.
公開している素性構造処理用の言語LiLFes,および,それに基づく文法記述と構造解析プログラムをデモします. また,テキストからの知識獲得を支援するシステムTIMS,テキストからの情報抽出システムGENIA,計算機システム・ユーザとの対話システムなど,一般公開するプログラムの性能を示すデモを行います.
近年のディジタル化技術の急速な発展により,複数のメディアが統合された高度マルチメディア情報処理環境の構築に対する要望が強い. そこで,本プロジェクトでは,先進的なマルチメディア情報処理環境を構築するための核技術として,マルチメディア・コンテンツを蓄積し,共用・再利用を可能とする大規模マルチメディアデータベースシステムを構築する方法論の確立を目的とする.
具体的には,多様なユーザからの要求に応じることができる柔軟なマルチメディアデータモデルの設計と,そこに格納されるマルチメディア・コンテンツの加工・編集処理システムの開発を行い,実社会の使用に耐え得る大規模マルチメディアデータベースのためのシステムアーキテクチャの構築を目指す. 併せて,これらの諸技術を基盤とした高度なマルチメディア・コンテンツ処理技術の応用分野の可能性を探る.
本プロジェクトでは,上記の目的を達成するために,マルチメディア・コンテンツの処理の流れに沿って次の三つの研究テーマを中心に研究・開発を推進している.
他のプロジェクトが平成8年度から開始したのと異なり,本プロジェクトは平成9年度から開始しており,来年度が最終年度であることから,本年度はデモ・展示は行わない.
計算機の計算能力の向上が科学技術の進歩に直接的に寄与し得ることが明確になって,計算機の性能の一層の向上が望まれている. 近年,高速計算のプラットフォームは専用並列計算機の他,高速ネットワークで結合されたワークステーション群,インターネットに接続された計算機群など多様化しており,このような環境での分散・並列処理のソフトウェアの開発は必ずしも容易ではない. 我々は,計算科学・技術の研究者が,計算機の多様性をあまり意識せず,本来の分野の研究に専念できるような問題解決環境,コンパイラ,実行時環境,スケジューラなどのシステムサポートの実現を目指し,そのための先端的な要素技術の研究とプロトタイプの開発を行った.
タスク並列問題に必須となるスケジューリングの理論的解析を行った. コンパイラ中でこの問題を解くアルゴリズムPDF/IHS(世界最良)を開発し,加えて客観的評価のためのベンチマークを提案した.
逐次プログラムを並列タスクに分解する自動並列化コンパイラを開発した. 同時に新提案のcc-COMA型実行環境を用意し,コンパイルから実行までの完全セットが稼働している. さらに,並列処理の様子を可視化するツールも作成した.
分散共有メモリの性能向上のためのソフトウェア制御キャッシュを開発した. また,並列実行中のプログラムを別のコンピュータに移動させることをも可能とした.
並列論理型言語Orgelを新たに提案/開発し,これを用いることにより非数値計算における並列分散処理の有用性を追求し,高い性能を得た.
以上を総合して並列分散問題解決環境を構築した. 具体的にWWWベース並列電磁界解析が可能になっている.
スケジューリングアルゴリズムの評価用として公開している標準タスクグラフ,また動的スケジューラやPDF/IHSなど提案アルゴリズムとその結果,さらに,上記説明中,プロジェクト内で作成された自動並列化FortranコンパイラMIRAIと視覚化ツールNaraView,Orgelコンパイラ,PCクラスタ向け実行環境Fagus,ソフトウェア制御キャッシュ,タスク移送システムMOBA,WWWベース並列電磁界解析環境のデモを行う.
現代の社会は大規模で高度なソフトウェアによって支えられており,今後の社会の進展やIT化などによりそのようなソフトウェアに対する要求が益々強くなってくると思われます. しかしながら,現在このようなソフトウェアを効率良くかつ確実に開発し,進化・発展させるための技術が十分には確立されてはいません. この理由のひとつに,現在のソフトウェア開発技術が,十分な科学的な基盤の上に展開されておらず,計算機科学の最新の研究成果をとり入れることが出来ていないことがあげられます. このような立場から,本プロジェクトでは科学的・形式的手法にもとづくソフトウェア開発方法論を,
の4つの課題に焦点をあてて研究を行なってきました.
片山グループでは,科学的方法によってソフトウェアを開発し,また,開発されたソフトウェアを合理的に発展させるための発展的ソフトウェア開発方法論について,独創的な研究を行なってきました.
オブジェクト指向開発方法論は,発展的ソフトウェア開発には最も適していると考えられていますが,現在のオブジェクト指向方法論はその形式性の低いことが原因で,発展的ソフトウェア開発に必要な意味内容に立ち入った計算機支援を行なうことが困難です. 我々のグループでは,オブジェクト指向方法論を形式的基盤のうえに展開し,構成されたソフトウェアの発展を可能にする原理やメカニズムについて研究を行ってきました. その結果,形式的な分析モデル記述体系,定理証明技術を中心とした分析モデル構築支援システム,分析モデル実行システムなどについて本質的な研究成果が得られ,オブジェクト指向方法論の上流工程を科学的ベースにのせることに,原理的には成功しました. さらに,組み込みシステムを対象にして,設計・実装工程の形式的扱いの研究を進めています.
ソフトウェアは一回作ればそれで良いとういうものでなく,利用環境や仕様の変化などに対応して,進化・発展させなければなりません. また,大規模なソフトウェアはその全容を捉えることが困難で,発展的にしか構成することができません. 現在,ソフトウェア発展のための技術は不十分で,発展のためのコストは非常に大きなものになっています. 我々のグループでは,代数的束や構成的数学にもとづくソフトウェア発展のための数学的理論や,抽象解釈にもとづく発展的構成法などの独自の研究成果をあげることが出来ました.
本シンポジウムでは,オブジェクト指向方法論の形式的展開に関する2つのデモを行ないます. 一つは,高階論理定理証明系HOLを中心にした分析モデル構築支援システムに関するのものです. もう一つは,分析モデル実行システムに関するものです.
本プロジェクトでは,コンピュータプログラムの自動超高速化システムWSDFU(Waseda Simplify-Distribute-Fold-Unfold,ウスドゥフ)の開発に成功した. それは,実測値として最高1億倍以上の自動高速化を達成している. しかも,多くの場合,自動高速化はパソコンを用いても瞬時(1分以内)に行える. 人が走る速さと光の速さとの差が3千万倍以下であることを思えば,1億倍の差異の大きさが実感できよう. このような桁違いの高速化を自動的に行うソフトウェアの開発は世界初である. WSDFUはまだ実験システムであるので,現段階では,高速化可能なプログラムの種類に制限がある. しかし,この成功により今後5年以内で制限を取除ける見通しが得られている. WSDFUが実用化された場合,次のようなことが期待できる:
その他にも,プログラムの性能および信頼性を評価するためのテストデータ―の自動生成ソフトウェア,プログラムの計算時間を自動評価するソフトウェア等を開発し,WWW上で公開した. また,線分や区間に関する問題解決をするプログラムの系統的作成法を発見した.
プログラム自動超高速化システムWSDFUを用いて,現実的プログラムを一瞬のうちに高速化するデモを行う. また,分割統治法を用いたプログラムの計算時間の評価を自動的に行うソフトウェアの使い方および有効性などを説明する.
米澤グループでは,未来開拓学術研究推進事業として,移動オブジェクトのためのプログラミング言語システムの理論・実装技術などの研究を行なってきました. ここで移動オブジェクトとは,ネットワーク上のコンピュータ間を自律的に移動できるプログラムのことです. そして,この研究の成果として現在までに,言語システムを構成する幾つかのソフトウェアを開発・公開してきました.
一方,(株)日本総合研究所事業化研究グループでは,来る大容量ネットワーク時代を睨み,次世代ネットワークソフトウェア配信システムの開発に取り組み始めました. そのシステムでは,単にソフトウェアをダウンロードするのとは違い,ソフトウェアのインストール,バージョンアップ,レンタル,配信に伴う料金自動徴収,なども機能として想定しています.
そして今回,その配信システムの開発の基礎技術として,米澤グループの移動オブジェクト技術を採用しました. 「移動するソフトウェア」という考え方が次世代のソフトウェア配信に適していると判断したからです. 今後,米澤グループ成果の一つであるJavaGOシステムを使って,次世代ネットワークソフトウェア配信システムの開発を進めて行く予定です.
本展示では,同社事業化研究グループと米澤グループが共同で実装を行なった,ソフトウェア配信システムのプロトタイプによる,自動インストールのデモを行ないます. このデモでは,会社や学校などのLANで,LAN内の各PCの利用者が希望するソフトウェアや,LANの保守上必要なソフトウェア(例えばワクチンソフト)を各PCにインストールするという場面を想定しています. このとき,各PC利用者がパソコン初心者だとしたら,例えばシステム管理者を雇うなりして,各PCへのインストール作業をしてもらうことになるでしょう. しかし,何十台,何百台というPCが相手では,時間やコストの面で非常に負担となります.
自動インストールシステムでは,移動オブジェクトが各PCへ自在に移動し,ソフトウェアの配信・インストール作業を行なってくれます. 管理者は管理サーバを操作・管理するだけで済みます. 展示では,実際にPC数台により構成されたLANを用意し,LANに接続された全てのPCに,自動的にソフトウェアのインストールを行う様子を見ることができます. さらに,このシステムは,悪意ある第三者による,ソフトウェアの盗難や,PCへのウィルス感染などの危険に対処するため,移動オブジェクト(含ソフトウェア)に対する暗号化や,電子捺印の付加なども行なうよう設計されています.
米崎グループでは,人間とのインタラクションを主体とするいわゆるリアクティブシステムの誤りの無い実現を得るために,仕様記述の段階からの科学的な方法に基づく開発方法,特に論理に基づく形式手法の背景で必要となる理論と,その実現について研究を行ってきました.
ソフトウェアはますます社会基盤として使われる場面が大きくなり,その誤りのない実現は,社会の安全性にとって非常に重要な問題となっております. また小さな製品でもそれが私たちの生活の中で大量に使われるものについては,そこに含まれる欠陥が,それを製造する企業の存続に影響する事態さえ,十分に想定されます.
このようなシステムは,リアクティブシステムとして捉えられる場合が多く,その実現の誤りを防ぐために,システムの仕様記述の段階で,実現可能であるか,危険な場合の見落としが無いかなどを予め検証して実現段階に進む方法を取ることは,その仕様記述や検証にかかるコストに十分見合うようになってきました.
我々のグループでは,このようなシステムの誤りの無い開発を,仕様記述レベルからサポートする方法の背景にある理論と,その理論に基づいたソフトウェア開発サポートシステムの実現方法について,時間論理を基礎として研究を行いました.
その結果,計算時間の膨大さから非現実的であると言われている仕様検証を現実のものとするための,独創的なアイデアに基づく原理的な方法を明らかにすると共に,いくつかの技術的ブレークスルーを行いました. この成果は,検証システムの基本となるタブロー証明エンジンの細かなチューンアップにも反映され,仕様検証器としては,これまでにない性能レベルを達成致しました.
本展示では,PLTLによって記述されたリアクティブシステムの仕様検証システムのデモを行います. 具体的には,充足可能性,段階的充足可能性,強充足可能性の各判定を行ないます. また,タブロー展開にBDDを改善して用いることによる効果についても説明を行います. さらにモジュールに分割された仕様の検証の効率化のための様々な手法,特に部分評価を用いる方法についても実演を行います.
エージェントとは,状況に応じてそれ自体で局所的に判断や計算や通信や制御を実行する自律的ソフトウェア,自律的機器,自律的インタフェース等,あるいはそれらを構成する自律的部品のことです. エージェント指向コンピューティングの研究開発によって,分散処理システム,開放システム,モバイルシステムのためのソフトウェアエージェント,知的制御システムやロボットのような知能機械システムのためのフィジカルエージェント,ヒューマンインタフェースのような人間=機械システムのためのインタフェースエージェントなどのエージェント技術とそれらの応用について,大きな発展が見込まれます. 本研究は,多様な通信プロトコルに対応できる新しいソフトウェアエージェントシステム,移動するユーザに追従してエージェントがネットワーク上を自律的に移動するアプリケーションとそのためのインタフェースエージェント,高度なリアルタイム性を持つフィジカルエージェント,リアルタイム・フィジカルエージェントの実装に不可欠なリアルタイム通信インタフェース等の設計と実装を行い,現実に利用できるシステムを開発することを念頭に置いて,エージェント指向コンピューティングの未来開拓を行なってきました.
多様な通信プロトコルへの対応,通信切断への対応,ラインタイムシステムのオンデマンド転送,その他種々の特徴をもつ,新しいソフトウェアエージェントシステムを開発しました. また,ネットワーク環境下におけるソフトウェアエージェント技術の応用として,最適エージェントの発見・処理依頼手法,画像処理を利用した移動ユーザの追跡機構などのシステム(ここにはインタフェースエージェントの開発が含まれる)を設計・実装しました.
特に,ソフトウェアエージェントの応用例として,医療現場を想定した移動ユーザへの情報提供システムをデモ・展示します. このシステムは,画像処理によりユーザの移動を追跡するととも,ユーザが必要な情報を持つソフトウェアエージェントをユーザが移動するたびにその近くの端末に移動させることにより,ユーザに端末や書類の携帯などの負荷をかけることなく,そのユーザに特化したサービスを継続的に提供するシステムで,医療分野にとどまらず広範な応用が期待できます.
人間の環境認識や環境作用を代替する機能を持つ物理システムを,リアルタイム・フィジカルエージェントとして設計・実装しました. このエージェントは,すべての計算や通信をリアルタイムで管理しなくてはなりません. リアルタイム・フィジカルエージェント間で協調制御を実現するための方法論は確立されておらず,本サブテーマでは,その方法論を確立し,実証することを目的とし,リアルタイム通信インタフェースを開発してミリ秒オーダ以下の通信遅延を保証するとともに,それを組み込んだロバスト分散制御システムを実現しました. また,その応用として,バイラテラル機構を有するマニピュレータについて,触覚代替と動作代行を実現しました.
デモは,このシステムについて,双方向性をもつ触覚代替と力動作代行を行ないます. 具体的には,フリクションフリー機構をもつ2組のバイラテラルマニピュレータを,協調する2つのリアルタイム・フィジカルエージェントとする,物体の接触感取得と力動作システムをデモ・展示します.